Ausblick auf 2017
Olaf Lüke - 8 Jahre, 2 Monate her
Nach dem gestrigen Jahresrückblick wollen wir heute in die Zukunft schauen.
Besonders freuen wir uns auf eine neue Generation von Bricklets, welche wir euch heute vorstellen wollen.
Aktuell ist es so, dass auf den Bricklets je nach Funktion: Sensoren, Analog-Digital-Wandler, LEDs, Schnittstellenerweiterungen usw. verbaut sind, die direkt vom Prozessor des angeschlossenen Bricks gesteuert werden. Dieses Konzept hat den Vorteil, das für einfache Bricklets kein großer Bauteilaufwand notwendig ist. Technisch hat aktuell jedes Bricklet ein EEPROM welches Code für den jeweiligen Brick beinhaltet. Dieser Code wird von den Bricks in den eigenen Flash geschrieben und periodisch ausgeführt. Dadurch muss ein Brick nicht jedes einzelne Bricklet kennen und die große Vielfalt des Baukastensystems wird somit ermöglicht.
Nachteilig ist, dass der Prozessor auf dem Brick alle angeschlossenen Bricklets und seine eigene Brick-Funktionalität verarbeiten muss. Anwendungen, wie zum Beispiel Frequenzzähler o.ä., bei denen permanent auf ein Signal reagiert werden muss, sind daher schwer zu realisieren. Ein weiterer Nachteil ist, dass der Code auf den Bricklets nur zu den SAM3 und SAM4 Prozessoren von Atmel kompatibel ist. Früher konnten wir von einer langen Verfügbarkeit dieser Prozessoren ausgehen. Seit der Übernahme von Atmel durch Microchip ist dies leider nicht mehr sichergestellt.
Diese Probleme wollen wir durch eine neue Bricklet-Generation lösen. Die neuen Bricklets sind mit einem eigenen Co-Prozessor ausgestattet der nur zwei Aufgaben besitzt:
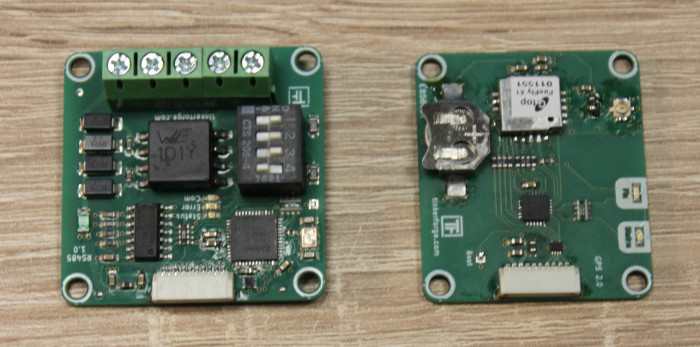
Der angeschlossene Brick wird somit deutlich entlastet, da er nur noch mit dem Bricklet kommunizieren muss und dabei recht flexibel entscheiden kann wann er das tun möchte. Die ersten neuen Bricklets dieser Generation werden der Nachfolger des GPS Bricklets und ein RS485 Bricklet sein.
Der aktuelle Plan sieht es vor alle Bricklets innerhalb von drei Jahren Stück für Stück auf die neue Variante mit Co-Prozessor umzustellen.
Nach der Umstellung gibt es keine Abhängigkeiten mehr von bestimmten Prozessortypen und die komplette Kommunikation findet über fest definierte Protokolle statt. Somit wäre nach der Umstellung zum Beispiel auch ein Raspberry PI Shield möglich, mit dem ein RPI direkt mit den Bricklets kommunizieren könnte.
Über technische Details zu den Co-Prozessoren und verwendeten Protokollen werden wir später noch berichten. Über diesen Blogeintrag würden wir gerne noch Feedback zu einem speziellem Detail einholen: Dem Bricklet Stecker.
Aktuell nutzen wir 10 polige Stecker/Buchsen aus der JST SH Reihe. Die Buchse ist funktional und passt von der Größe her perfekt auf unsere 4x4cm Bricks. Sie hat allerdings den Nachteil dass der Stecker nicht einrastet. Wenn der Stecker schräg eingesteckt wird, kann es passieren das in der Buchse Pinne verbogen werden (dies kann zu Kurzschlüssen oder ähnlichem führen).
Für die Kommunikation mit den neuen Co-Prozessor Bricklets werden theoretisch nur 7 Leitungen benötigt. Dies ermöglicht es uns theoretisch auf andere Stecker umzusteigen, die komfortabler zu benutzen sind. So gibt es von JST die GH Reihe von Steckern:
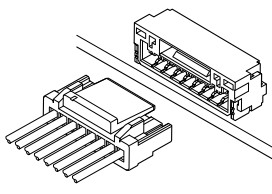
Dieser Stecker hat eine Lasche die einrastet. Zusätzlich sind die Pinne in der Buchse doppelseitig oben und unten am Gehäuse angebracht. Dies erlaubt eine bessere Verbindung während Erschütterungen (es sind immer zwei Kontaktpunkte vorhanden) und es kann nie zu krummen Pinnen kommen. Die Haptik der Stecker ist toll, beim zusammenstecken gibt es sogar ein befriedigendes “Klick-Geräusch”.
Die Frage an euch ist nun: Hättet ihr es lieber das wir auf diesen neuen Stecker umsteigen, oder würdet ihr es vorziehen das wir im kompletten System bei den alten Steckern bleiben?
Szenario 1
Szenario 2
-
Die Stecker auf den neuen Co-Prozessor Bricklets sind 7-Pol JST GH.
-
Es gibt zwei Bricklet-Kabel-Varianten: 10-Pol zu 10-Pol für alte Bricklets und 10-Pol zu 7-Pol für die neue Bricklet Generation.
-
Nachdem alle Bricklets umgestellt sind (vielleicht in 3 Jahren) können die Stecker auf den Bricks auch auf 7-Pol umgestellt werden.
-
Danach gibt es dann nur noch 7-Pol zu 7-Pol Bricklet-Kabel.
In beiden Szenarien sind die alten Bricklets und die Bricklets der neuen Generation komplett kompatibel zueinander und zu den alten Bricks.
Welches Szenario würdet ihr vorziehen? Bitte teilt uns eure Meinung dazu im Forum mit. Danke!