We will be at the Elektor Live as an exhibitor.
If you always wanted to give us your opinions in person, you can do so on October the 20th in the Kongresszentrum of the Westfalenhalle in Dortmund. We will have our booth in the Goldsaal Forum.
Olaf Lüke - 13 years, 6 months ago
We will be at the Elektor Live as an exhibitor.
If you always wanted to give us your opinions in person, you can do so on October the 20th in the Kongresszentrum of the Westfalenhalle in Dortmund. We will have our booth in the Goldsaal Forum.
Olaf Lüke - 13 years, 6 months ago
The Barometer Bricklet is now available:
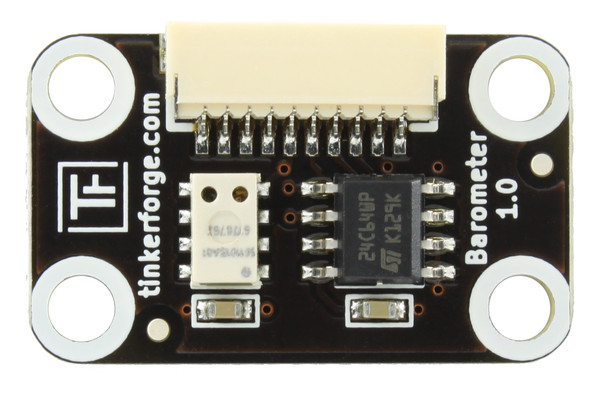
It uses the very precise MS5611-01BA01 air pressure sensor. While testing we found out that it is really easy to detect doors being opened and closed. In the 0.01mbar range the air pressure is changing quite a bit. So if you want to reach a stable altitude calculation with this resolution (10cm) you will need to do some sensor fusion with a motion sensor, like the IMU Brick.
On a related note: We changed our circuit board supplier. Starting with the Barometer Bricklet, all of the circuit boards we are using will be “Made in Germany”:
Now the whole manufacturing process (PCB production, PCB assembly and testing) is done in Germany!
Olaf Lüke - 13 years, 6 months ago
Last Friday our EMS manufacturer produced the first WIFI Extensions. The production preparation was not easy since the WIFI modules are only solderable with a peak temperature of 240°C. We have to produce them lead-free, so this is not an easy task for our manufacturer. Unfortunately the reflow process produced a huge amount of solder bridges.
After some investigation we found the reason for it. Since we were soldering with low temperatures there is not much tolerance for the used materials. It turns out that the surface finish and pad dimensions of the circuit boards do not have the same quality as the circuit boards we got before. The boards are electrically fully usable, but these minor divergences are enough to make troubles. Below is a microscopic image of the stack connector pads of a WIFI Extension (top) and another Extension (bottom):
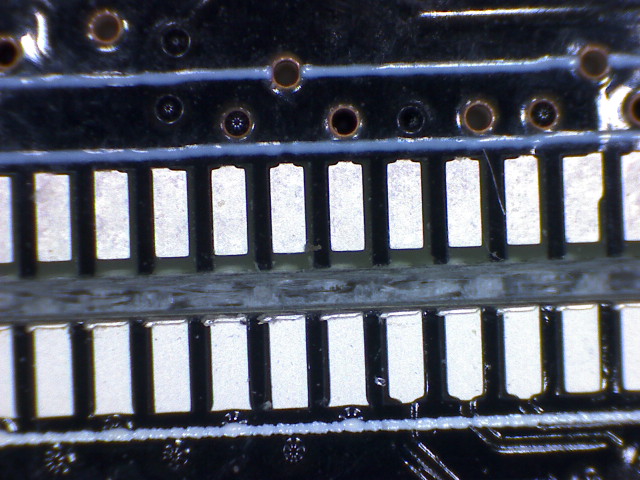
You can see that the pads are for some reason not completely filled in and the surface finish is of poor quality. To solve the soldering problems we ordered modified stencils and another type of soldering paste. We are currently waiting for both to arrive. We will restart production presumably on friday and use the additional time for testing and to implement more WIFI features (more configuration possibilities). If everything works as expected we will add the WIFI Extension to the shop on next Monday.
Olaf Lüke - 13 years, 6 months ago
We had some customers reporting problems with the LCD 20x4 Bricklet. In some cases, especially in conjunction with the usage of a Dual Relay Bricklet, there seemed to be a problem with non responsive displays or slowly dimming backlights. After some investigation we found a possible reason for this. The I2C Port Extension MCP23017 is used on this bricklet. Unfortunately there is a bug in the reset circuitry of this chip on all of our LCD Bricklets. In some cases it can happen, that the reset circuitry of the IC is triggered. Fortunately we found a workaround for this problem and have shipped LCD 20x4 Bricklets with it since early August. Since the feedback for the LCD Bricklets with the workaround was all around positive, we have to conclude that this was really the reason for the problems. You can recognize a fixed LCD Bricklet by a small capacitor that is soldered between two pins on the big IC in the middle of the LCD 20x4 Bricklet:
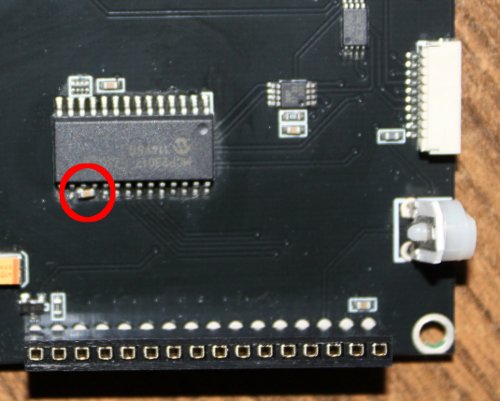
If you have the described problems with your LCD20x4 (not responsive or slowly dimming backlight): Please contact us at info@tinkerforge.com, we will replace your old LCD 20x4 Bricklet with one that has the workaround.
Olaf Lüke - 13 years, 8 months ago
In a blog post on May 25th we announced, that we had to stop selling the Chibi Extension and that we want to offer a WIFI Extension as an alternative. Unfortunately, it took us a while to find a suitable WIFI Module.

We tested many demo boards and designed some prototypes. Typically these WIFI modules are intended to be used in industrial applications, so we had different problems to find a suitable module. Problems where low data throughputs and high latencies (problematic with getters), lead time, availability of the modules and connection problems with consumer WIFI routers. Another challenge was that we wanted to use an SPI Interface, most modules offer this interface but it seems that it is rarely used. Therefore it is never well documented.
At first we wanted to use the Wifly module. The implementation was already pretty much done when we found out that it doesn’t work well with consumer WIFI routers. After a lot of back and fourth we now decided to use the GS1011MEES from GainSpan.
This module is on the expensive side, but it has some nice features, e.g.:
802.11b/g/n
WPA/WPA2 Personal and Enterprise
long range capability (18dBm output power)
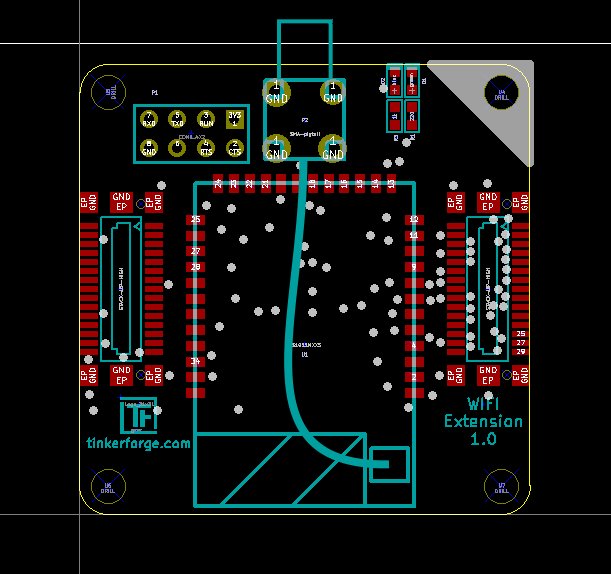
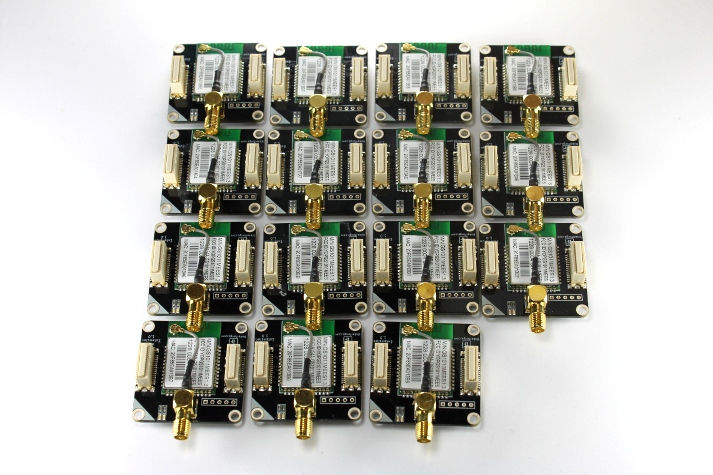
A prototype circuit board for this module was ordered at the beginning of this week. The prototype is equipped with an U.FL to SMA pigtail cable, so it is possible to use an SMA Antenna directly and it is possible to use the U.FL connector to connect to a socket in a housing!
Next week we will hopefully get the prototype circuit board, so we can test the product as it will be sold later on. If it passes the tests we will immediately order everything that is needed to start the production.
This means that we unfortunately can’t hold the originally planned release date. But the light at the end of the tunnel is definitely within sight now!