Im Blogeintrag vom 25. Mai haben wir angekündigt, dass wir die Chibi Extension nicht weitergeführt können. Wir planten eine WIFI Extension als Alternative kurzfristig anbieten zu können. Leider haben wir einige Zeit benötigt um ein geeignetes WIFI Modul zu finden.

Wir haben einige Demoboards gekauft und für einige Module Prototypen erstellt. Typischerweise werden diese WLAN Module für industrielle Anwendungen genutzt, so dass wir verschiedenste Probleme hatten ein geeignetes Modul zu finden.
Probleme gab es mit geringen Datenraten und hohen Latenzen (problematisch für Getter), Lieferzeiten, Verfügbarkeit der Module und Verbindungsprobleme mit nicht-”Industrie WLAN Routern”. Dazu kam die Herausforderung die SPI Schnittstelle zu nutzen. Viele Module besitzen diese Schnittstelle, sie scheint aber nicht oft benutzt zu werden. Daher ist die Schnittstelle nie sonderlich gut dokumentiert.
Nachdem wir uns erst für das Wifly Modul entschieden hatten, mussten wir nachdem die Software Implementierung so gut wie fertig war, feststellen dass dieses Modul nicht mit WLAN Routern funktioniert die im Privatbereich üblich sind (z.B. Fritz Box). Nach vielem hin und her haben wir uns nun für das GS1011MEES von Gainspan entschieden.
Dies ist nicht das günstigste Modul, hat aber einige nette Eigenschaften, z.B.:
802.11b/g/n
WPA/WPA2 Personal und Enterprise
Hohe Reichweite (18dBm Sendeleistung)
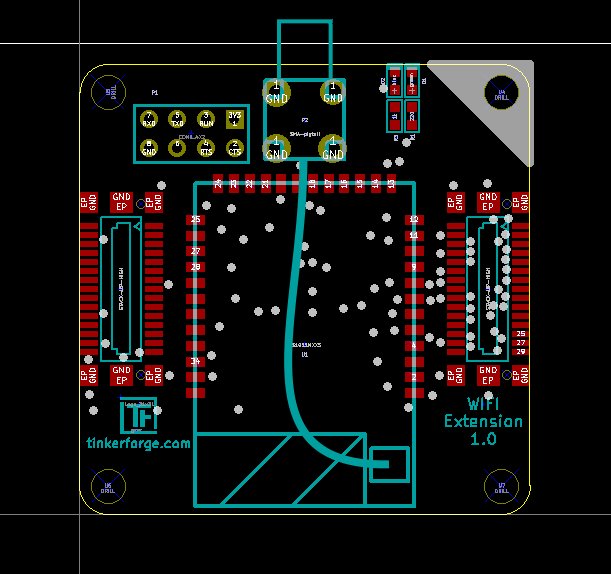
Wir haben am Anfang der Woche Leiterplatten für einen neuen Prototypen für dieses Modul bestellt die mit einem U.FL zu SMA Kabel ausgestattet wird. So können sowohl herkömmliche SMA Antennen an das Modul angeschlossen werden, es ist aber auch möglich direkt den U.FL Stecker zu benutzen um eine SMA Buchse anzuschließen die in einem Gehäuse sitzt! Nächste Woche erhalten wir hoffentlich die Leiterplatten und können dann das WLAN Modul in der Konfiguration testen wie es später verkauft werden soll. Wenn es alle Tests besteht werden wir sofort alles notwendige Bestellen um die Produktion zu starten.
Dies bedeutet, dass wir das ursprünglichen Veröffentlichungsdatum leider nicht einhalten können. Allerdings ist das Licht im Ende des Tunnels nun definitiv in Sichtweite!